Projects
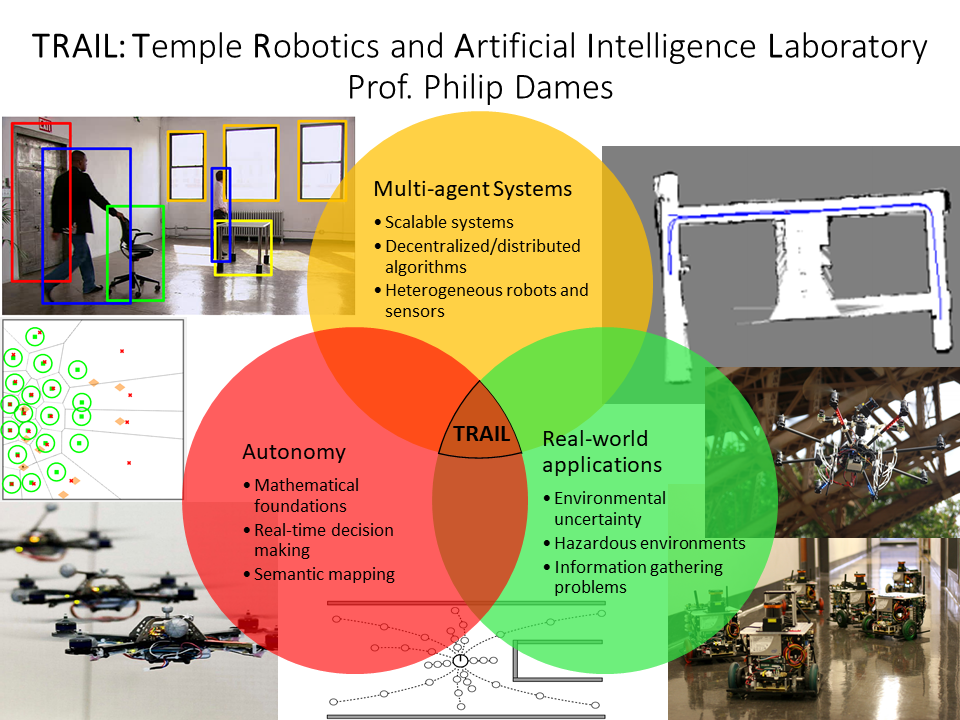
Our current research exists at the intersection of three broad areas of research: Multi-Agent Systems, Autonomy, and Real-World Applications. See how our current projects are taking on these challenges below!

Bimanual Manipulation
Manipulation of objects using two robotic arms.
Distributed Tracking
The ability to track, predict, and reason about pedestrians and vehicles in dense urban environments.
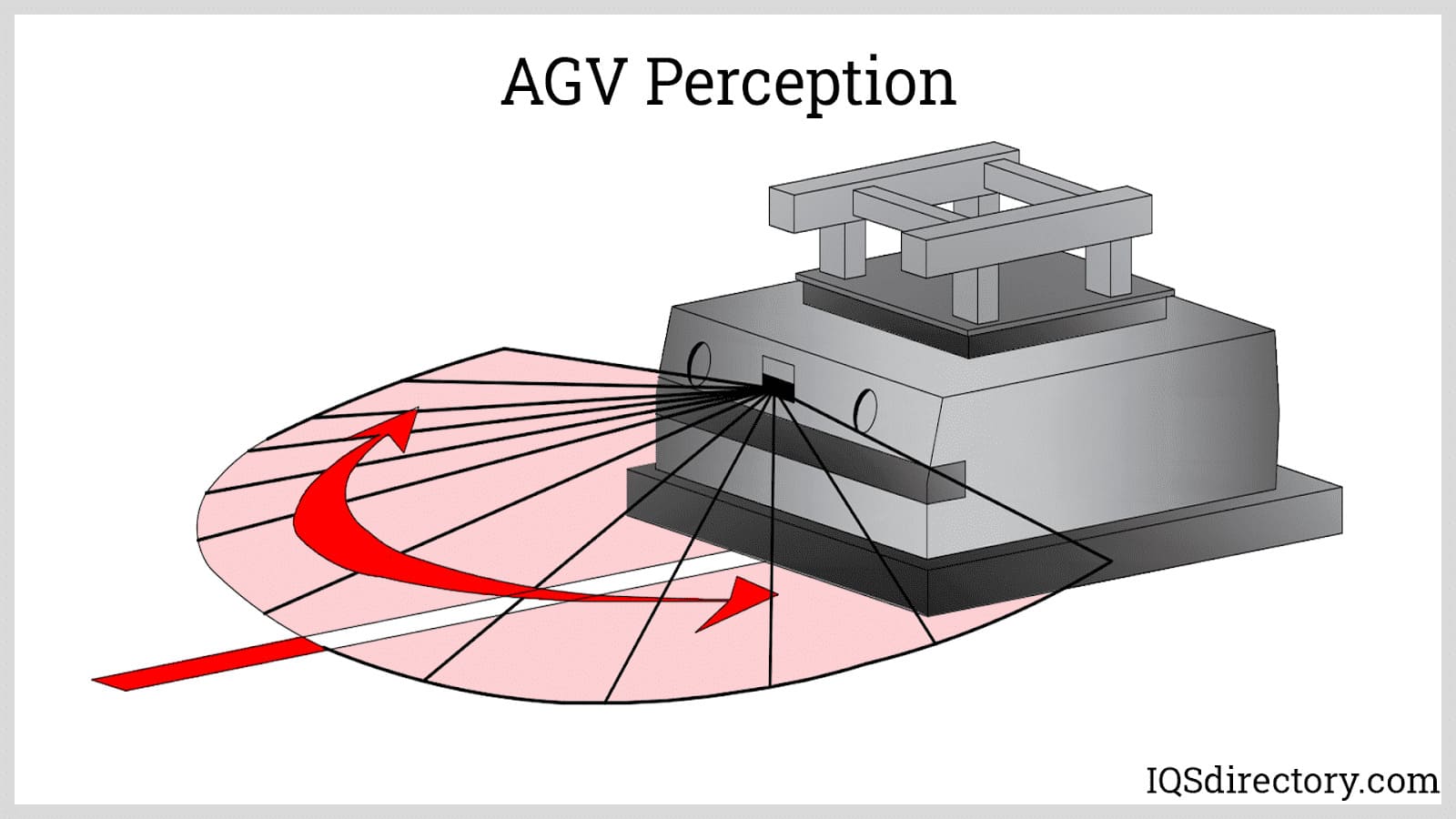
Local Autonomous Navigation For Materials Handling Ground Vehicles

Safe Navigation Through Crowded Dynamic Environments